custom_image

Control architecture prototype
A control architecture protoype to test simple ideas on a 2D robot before going on more complex robots

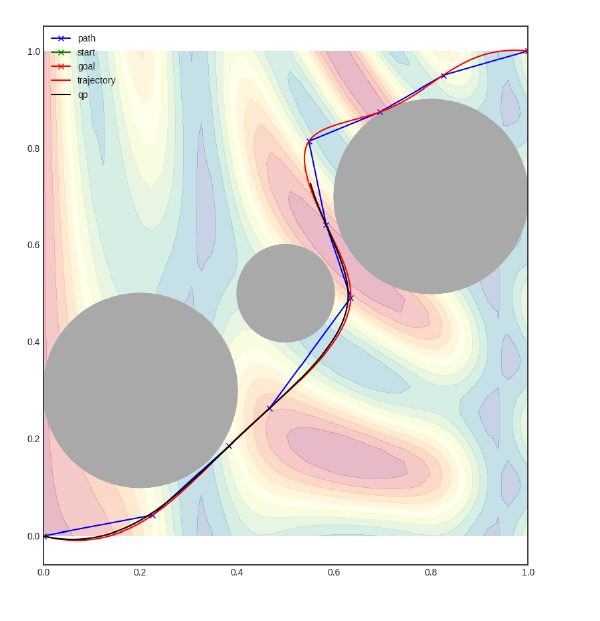
Controller using Quadratic programming formulations
Librairies to control a robot manipulator using quadratic programming.

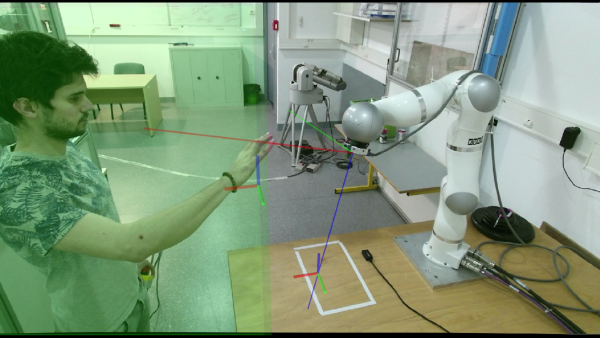
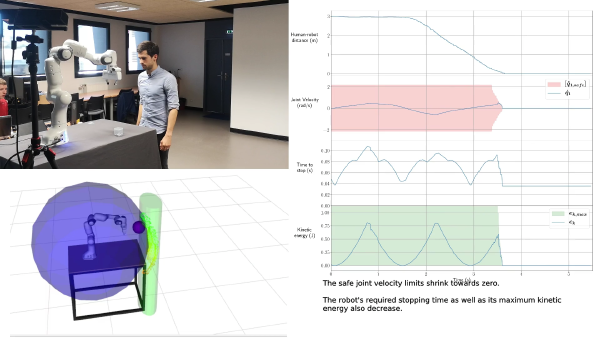
Distance constraint
Keep a minimal distance between a human an a robot through a QP constraint


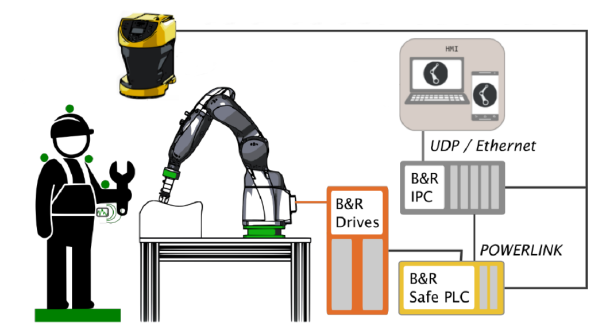
Realtime control architectures
Keep a minimal distance between a human an a robot through a QP constraint
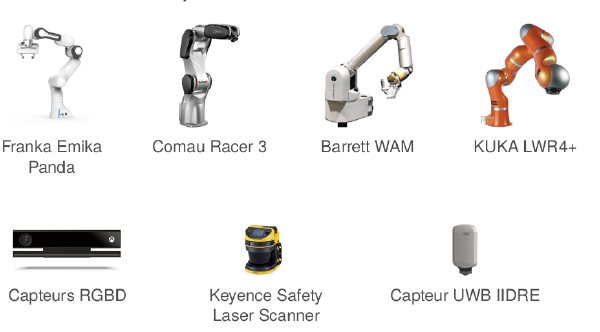
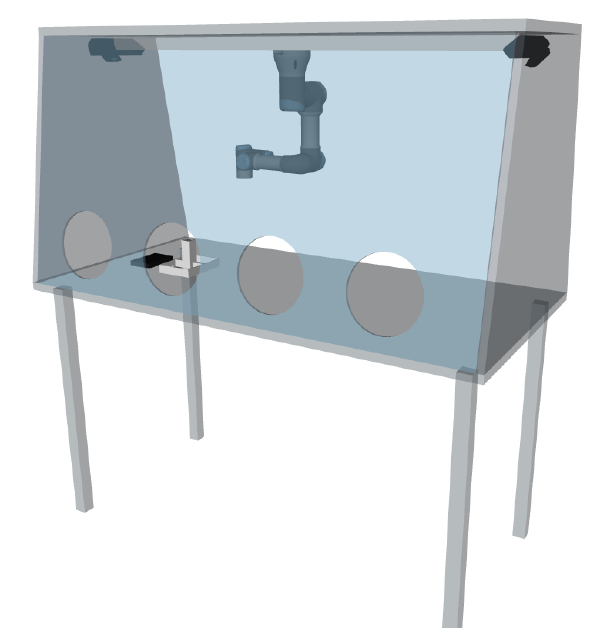
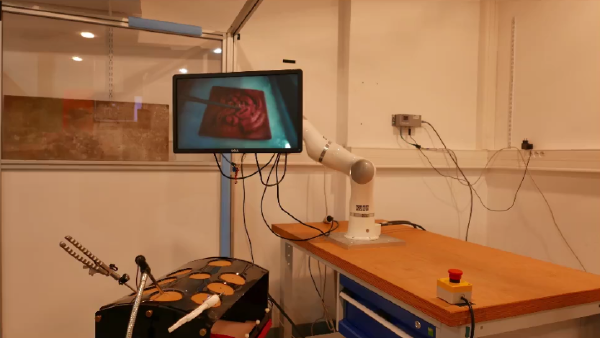
Robots and sensors
Keep a minimal distance between a human an a robot through a QP constraint





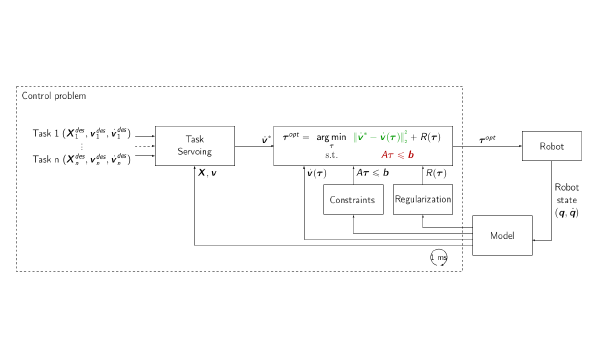
Torque regularisation
Expressed a regularization that compensate the gravity induced torques.

