Development
Control architecture prototype
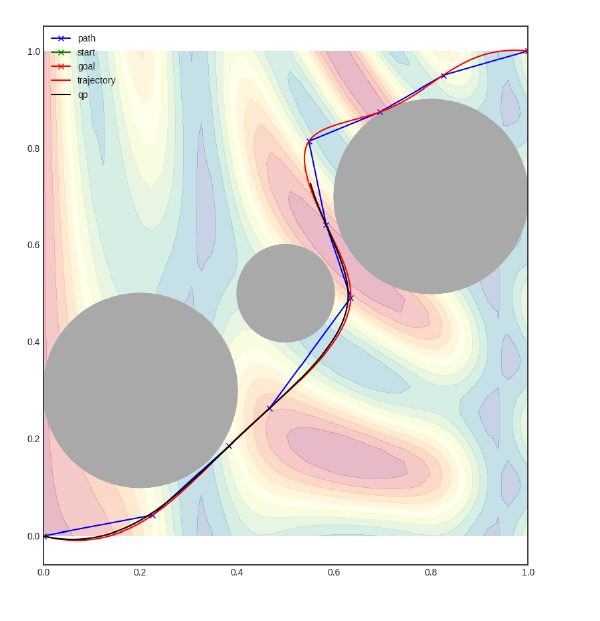
A control architecture protoype to test simple ideas on a 2D robot before going on more complex robots

Controller using Quadratic programming formulations
Librairies to control a robot manipulator using quadratic programming.


